Tianye Ding

“What I cannot create, I do not understand.”
— Richard Feynman
Hi! I am currently a Research Assistant at Visual Intelligence Lab at Northeastern supervised by Prof. Huaizu Jiang. I graduated magna cum laude with a B.S. Computer Science degree from Khoury College of Computer Sciences, Northeastern University.
My research interests lie at the intersection of computer vision and geometric deep learning. I am driven by the goal of bridging the gap between interpretable classical methods and modern black-box models. Specifically, I explore how integrating explicit structural priors—such as geometry, compositionality, and physical laws—can unlock capabilities beyond those accessible through scaling alone. My work spans from designing efficient, mathematically grounded perception algorithms to developing 3D and 4D generative models that maintain physical consistency across time and space.
One of my personal passions is crafting blog posts that highlight the key insights and my thought processes behind the innovative solutions that drive breakthroughs in my research projects. I firmly believe that sharing these experiences can not only inspire others but also shed light on the fundamental issues at the core of the topics I’ve explored.
News
| Jun 30, 2024 | Our work ODTFormer: Efficient Obstacle Detection and Tracking with Stereo Cameras Based on Transformer has been accepted for oral pitch and interactive presentation at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024. See you in Abu Dhabi |
|---|---|
| Mar 22, 2024 | I just rebuilt my homepage to be more developer and user friendly! |
Latest Posts
Selected Publications
Symbol * represents equal contribution; † represents equal advising.
-
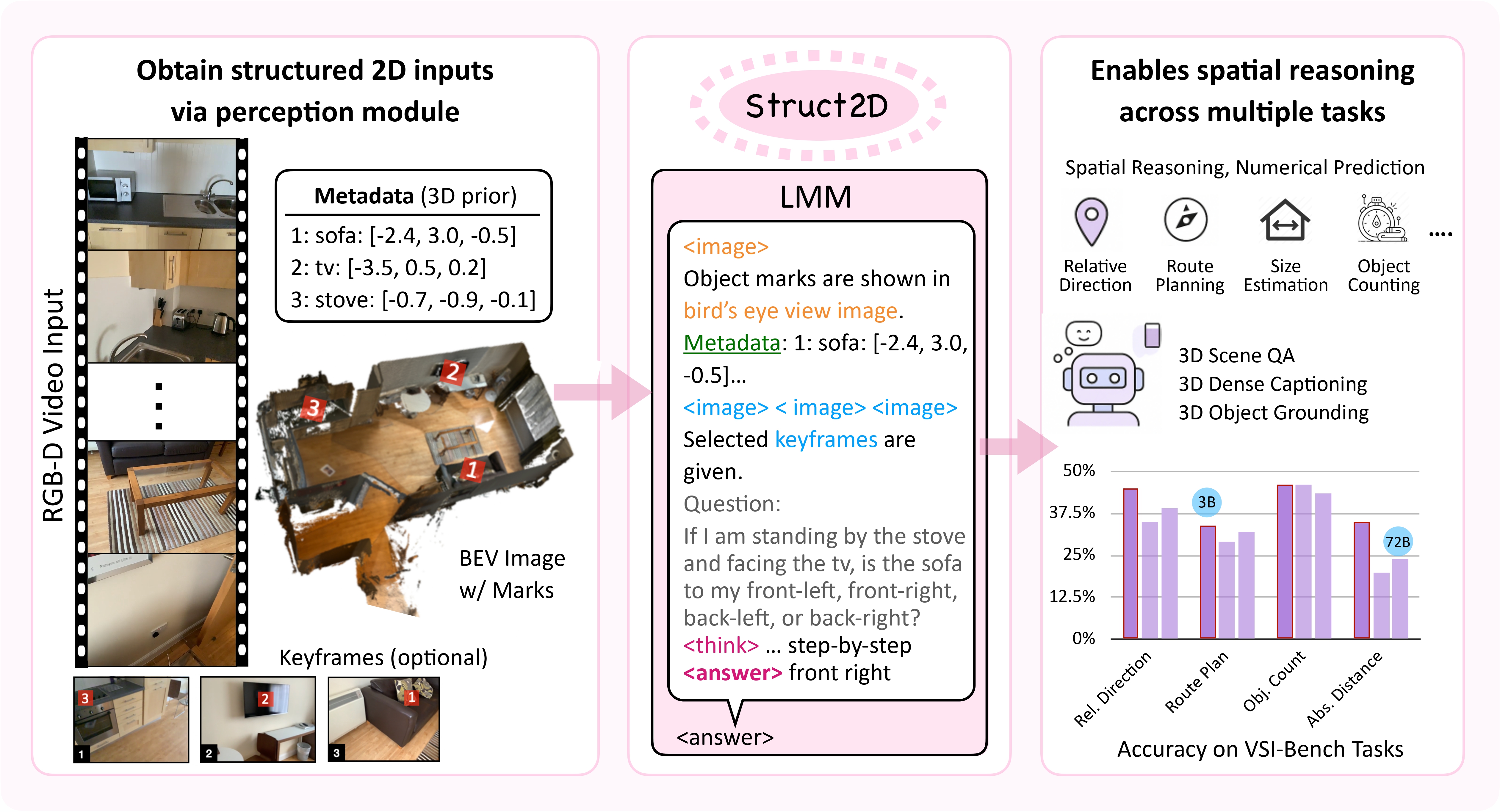 Struct2D: A Perception-Guided Framework for Spatial Reasoning in Large Multimodal ModelsNeural Information Processing Systems (NeurIPS), 2025
Struct2D: A Perception-Guided Framework for Spatial Reasoning in Large Multimodal ModelsNeural Information Processing Systems (NeurIPS), 2025